Создание 3D Engine. Часть 1.
Разбирал у себя завалы на винчестере, и нашел работы, которые делал в университете, исследования которых потом попали в дипломную работу. Дипломная работа касалась 3Д движка для отображения техмерных сцен.
В цикле статей я приведу несколько старых алгоритмов для отрисовки сцен, подходя к самому движку, будут выложены исходные тексты программ и версий движка, а так же сам текст дипломной работы. До теперешних 3Д сцен далеко конечно, но более 10 лет назад это было вполне приемлемо и конкурентно способно. Хватит отступлений и перейдем к делу.
Алгоритм определения видимых поверхностей путём трассировки лучей.
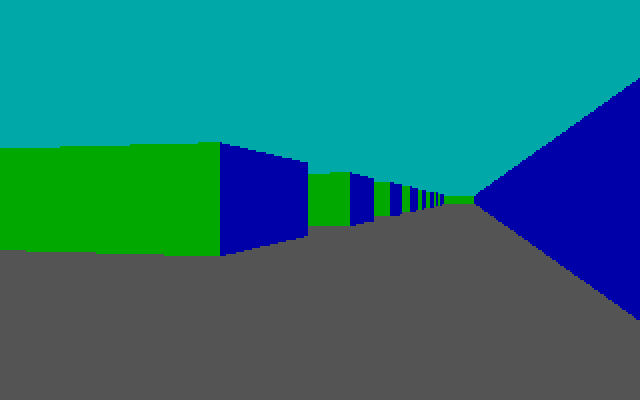
Это один из самых первых алгоритмов создания игр, поэтому рассмотрим как работает алгоритм на примере устройства классической игры Wolfenstein 3D фирмы IDSoftware.
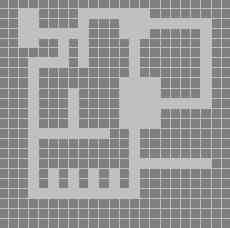
Наверное, одно из самых ключевых понятий Wolfenstein 3D - игровое поле. Оно представляет собой лабиринт. Конечно в общем случае для игр виртуальной реальности нет ограничений на высоту стен, на угол, под которым эти стены расположены, на наличие потолка и на замкнутость лабиринта. В нашем же случае смело можно отображать все игровое поле на клетчатой бумаге.
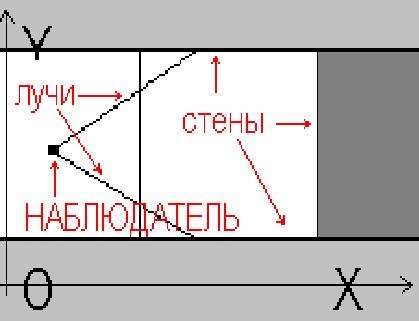
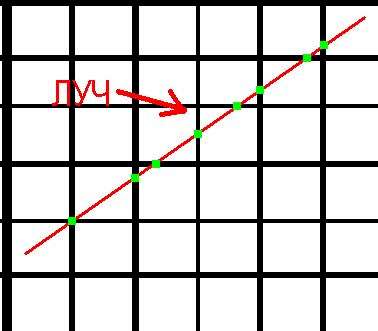
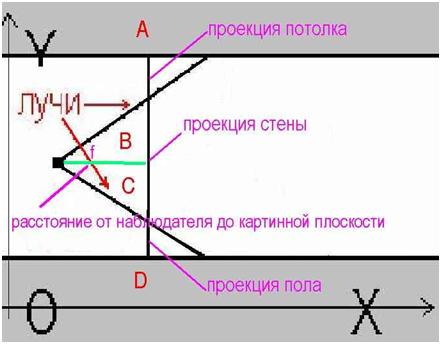
Реализуем все это следующим образом. Проверим на пересечение с лучом сначала вертикальные, а потом горизонтальные стены. Далее выберем ближайшее пересечение.
Пусть наблюдатель находиться в точке с координатами (x*,y*), а угол между лучом
и положительным направлением оси 0X равен alpha. Будем считать, что клетка, содержащая игрока, имеет индекс (i*,j*), а шаг сетки равен h. Найдем точки пересечения луча с вертикальными линиями x=ih. Если направляющий вектор луча имеет положительную х-составляющую (cos(alpha)>0 => alpha от -pi/2 до pi/2), то ближайшая точка будет иметь координаты x1=(i*+1)h, y1=y*+(h-(x*-i*h))tan(alpha)=y*+(x1-x*)tan(alpha). При этом эта точка лежит на границе клетки (i*+1,[y1/h]). Если эта клетка занята стеной, то пересечение сразу получается в точке (x1,y1). При этом расстояние до точки пересечения будет равно d=(x1-x*)/cos(alpha). Если же эта клетка пуста, то проверяем следующие точки: Xi+1=Xi+h, Yi+1=Yi+htan(alpha). Здесь i-ая точка соответствует клетке (i*+i,[Yi/h]). Проверка происходит до тех пор, пока мы либо не наткнемся на занятую клетку, либо не выйдем за пределы лабиринта.
Теперь рассмотрим случай, когда cos(alpha)<0 (alpha то pi/2 до 3pi/2). Ближайшая точка пересечения луча с линией вида x=ih описывается формулами: x1=i*h, y1=y*-(x*- 1)tan(alpha)=y*+(x1-x*)tan(alpha). Первой проверяется клетка (i*-1,[y1/h]). Если она занята, то пересечение найдено и расстояние до точки пересечения равно d=(x1-x*)/cos(alpha). Иначе необходимо проверить остальные точки пересечения: Xi+1=Xi-h, Yi+1=Yi-htan(alpha). Для точки (Xi,Yi) следует проверить клетку (i*-i,[Yi/h]). Если она занята, то расстояние до точки пересечения составит d=(Xi-x*)/cos(alpha).
Получаем следующий код.
float checkVWalls ( float angle )
{
int xTile = (int) locX; //cell indices
int yTile = (int) locY;
float xIntercept; // intercept point
float yIntercept;
float xStep; // intercept steps
float yStep;
int dxTile;
if (fabs ( cos ( angle ) ) < 1e-7 )
return 10000.0;
if (angle >= ANGLE_270 || angle <= ANGLE_90 )
{
xTile ++;
xStep = 1;
yStep = tan ( angle );
xIntercept = xTile;
dxTile = 1;
}
else
{
xTile --;
xStep = -1;
yStep = -tan ( angle );
xIntercept = xTile + 1;
dxTile = -1;
}
//find interception point
yIntercept = locY + (xIntercept - locX)* tan ( angle );
for ( ;; )
{
yTile = yIntercept;
if ( xTile < 0 || xTile > 52 || yTile < 0 || yTile > 9 )
return 10000.0;
if ( worldMap [yTile][xTile] != ' ' )
return ( xIntercept - locX ) / cos ( angle );
xIntercept += xStep;
yIntercept += yStep;
xTile += dxTile;
}
}
Точно так же находится ближайшая точка пересечения луча с горизонтальными линиями сетки y=ih.
При alpha от 0 до pi: x1=x*+(y1-y*)ctg(alpha), y1=(j*+1)h, Xi+1=Xi+hctg(alpha), Yi+1=Yi+h. При alpha от pi до 2pi x1=x*+(y1-y*)ctg(alpha), y1=(j*-1)h, Xi+1=Xi-hctg(alpha), Yi+1=Yi-h.
Код для горизонтальной проверки выглядит так.
float checkHWalls ( float angle )
{
int xTile = (int) locX;
int yTile = (int) locY;
float xIntercept;
float yIntercept;
float xStep;
float yStep;
int dyTile;
if (fabs ( sin ( angle ) ) < 1e-7 )
return 10000.0;
if ( angle <= ANGLE_180 )
{
yTile ++;
xStep = 1 / tan ( angle );
yStep = 1;
yIntercept = yTile;
dyTile = 1;
}
else
{
yTile --;
yStep = -1;
xStep = -1 / tan ( angle );
yIntercept = yTile + 1;
dyTile = -1;
}
xIntercept = locX + (yIntercept - locY) / tan ( angle );
for ( ; ; )
{
xTile = xIntercept;
if ( xTile < 0 || xTile > 52 || yTile < 0 || yTile > 9 )
return 10000.0;
if ( worldMap [yTile][xTile] != ' ' )
return ( yIntercept - locY ) / sin ( angle );
xIntercept += xStep;
yIntercept += yStep;
yTile += dyTile;
}
}
void drawView ()
{
float phi;
float distance;
totalFrames++;
for ( int col = 0; col < 320; col++ )
{
phi = angle + rayAngle [col];
if ( phi < 0 )
phi += 2 * M_PI;
else
if ( phi >= 2 * M_PI )
phi -= 2 * M_PI;
float d1 = checkVWalls ( phi );
float d2 = checkHWalls ( phi );
distance = d1;
if ( d2 < distance )
distance = d2;
distance *= cos ( phi - angle ); //adjustment for fish-eye
drawSpan ( distance, WALL_COLOR, col );
}
}
Для задания углов лучей здесь используется массив rayAngle - для каждого луча указан угол между направлением луча и направлением взгляда игрока. Наиболее простым способом описания этого массива является задание углов с постоянным шагом, но, т.к. этот способ вызывает некоторые искажения, применим следующий алгоритм:
В рубрике: Программирование » Свои разработки » Софт
Теги: алгоритм исходники портал разработка растовая графика сектор сцена трассировка лучей
Вы можете следить за комментариями к этой записи поRSSРеклама
Здесь может быть ваша реклама
Заработок в Интернет

Описание freebitco

Описание FREEDOGECOIN

Описание Игры
Друзья


Оставьте комментарий